Evo-bots: A simple, stochastic approach to self-assembling artificial organisms
Juan A Escalera, Matthew J Doyle, Francesco Mondada and Roderich Groß
Abstract
This paper describes an alternative path towards artificial life - one by which simple modular robots with novel hybrid motion control are used to represent artificial organisms.
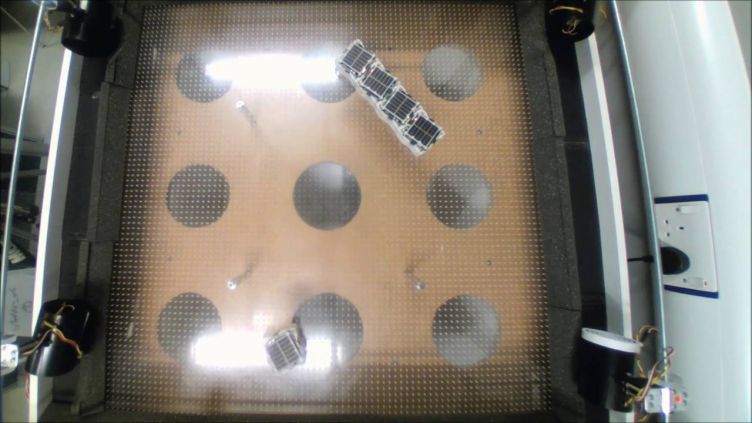
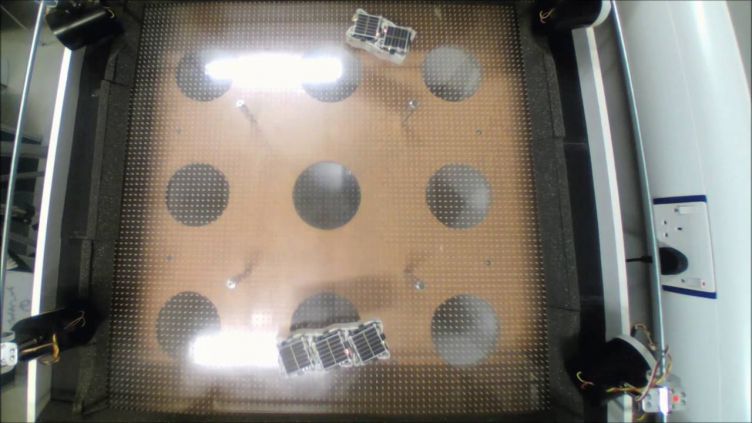
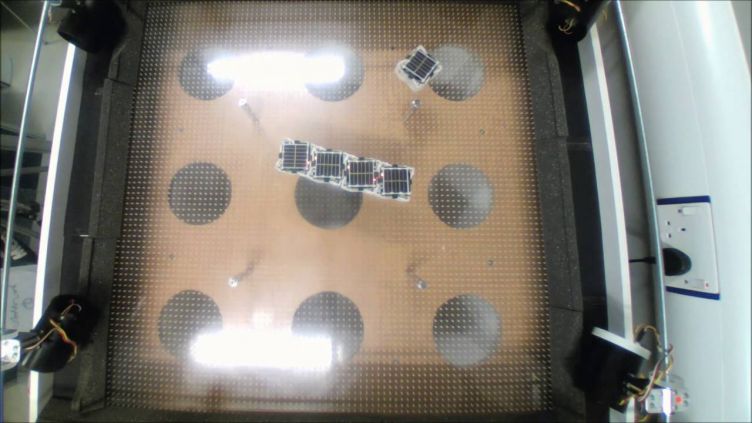
We present a hardware implementation of this system, the evo-bots, a set of self-reconfigurable modules that operate on an air table.
The modules use a stop-start anchor mechanism to either rest or move. In the latter case, they emulate Brownian motion.
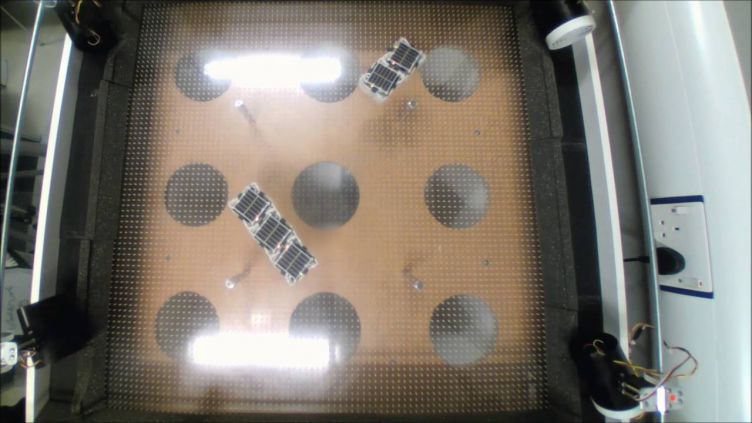
The modules can search for, harvest and exchange energy. In addition, they can self-assemble, and thereby form compound structures.
Six prototypes of the evo-bot modules were built. We experimentally demonstrate their key functions, namely hybrid motion control, energy harvesting and sharing, and simple structure formation.
Experiment videos
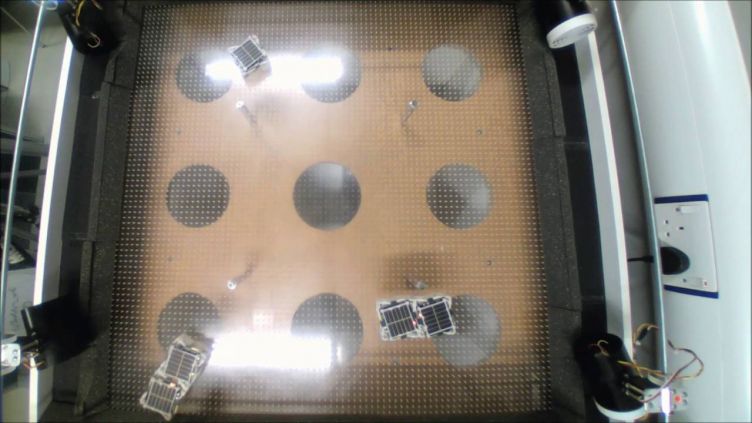
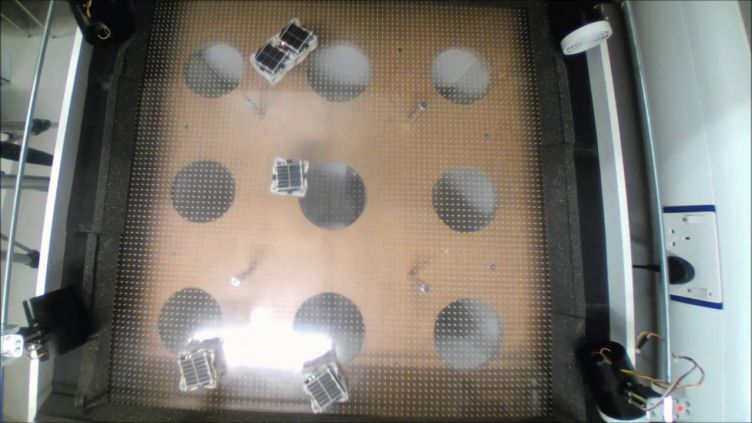
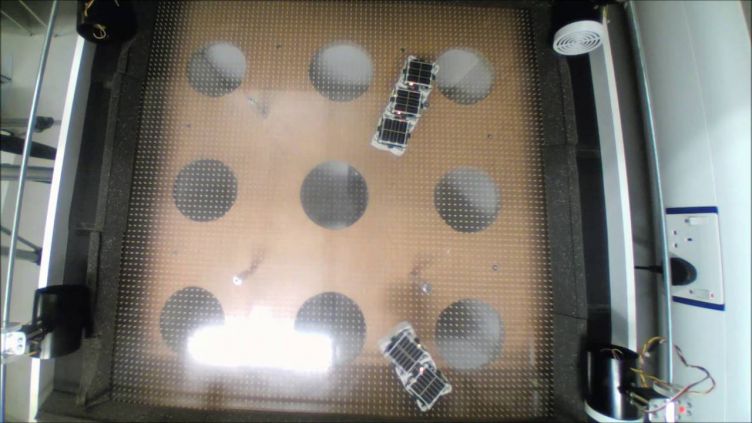
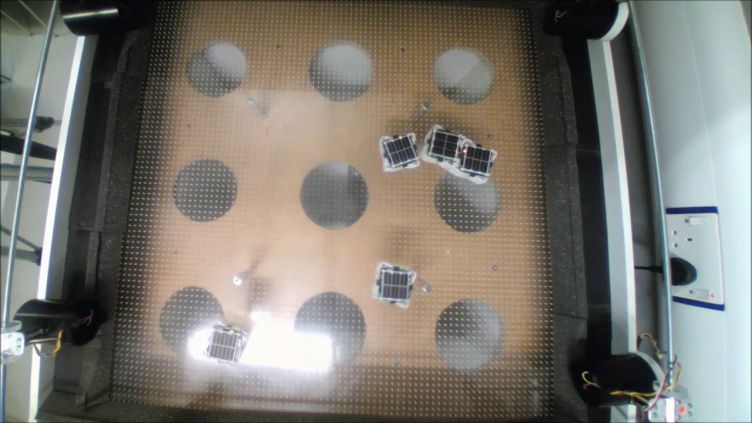
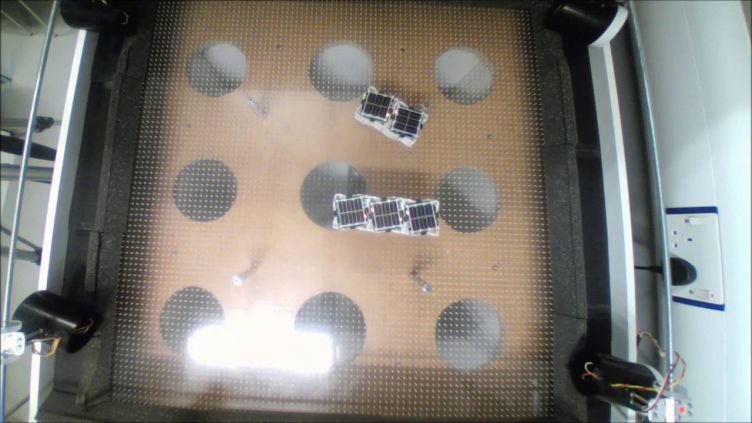
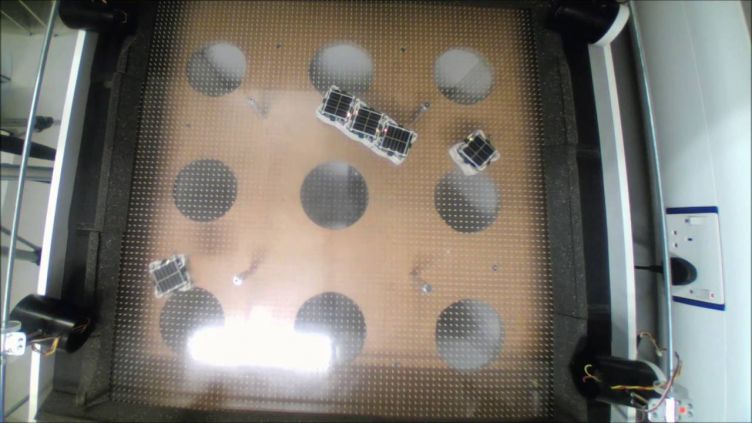
Linear polymer formation experiment
Five evo-bot modules forming a linear polymer.
- Trial 1
-
- Trial 2
-
- Trial 3
-
- Trial 4
-
- Trial 5
-
- Trial 6
-
- Trial 7
-
- Trial 8
-
- Trial 9
-
- Trial 10
-










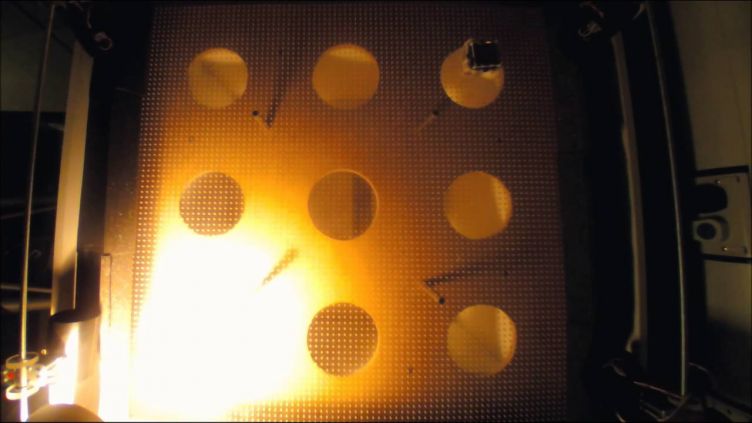
Stopping experiment
An evo-bot module stopping at a light intensity of 0.3 - 2.0V.
- 0.3V
-
- 0.4V
-
- 0.5V
-
- 0.8V
-
- 2.0V
-