Self-organised aggregation without computation
Abstract
This paper presents a solution to the problem of self-organised aggregation of embodied robots that requires no arithmetic computation.
The robots have no memory. They are equipped with one binary sensor, which informs them whether or not there is another robot in their line of sight. It is proven that the sensor needs to have a sufficiently long range; otherwise aggregation cannot be guaranteed, irrespective of the controller used.
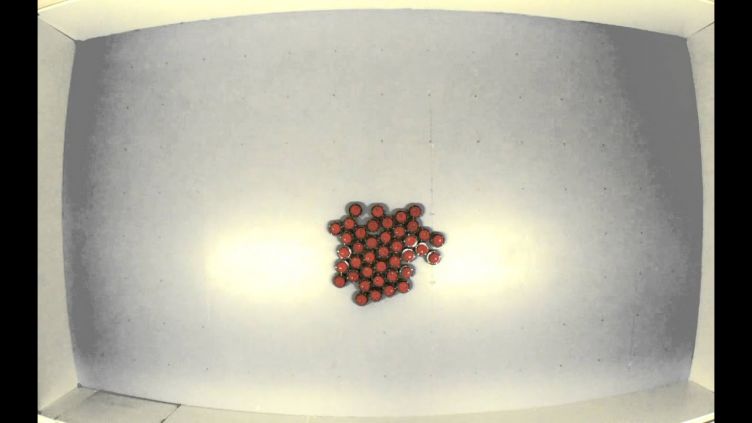
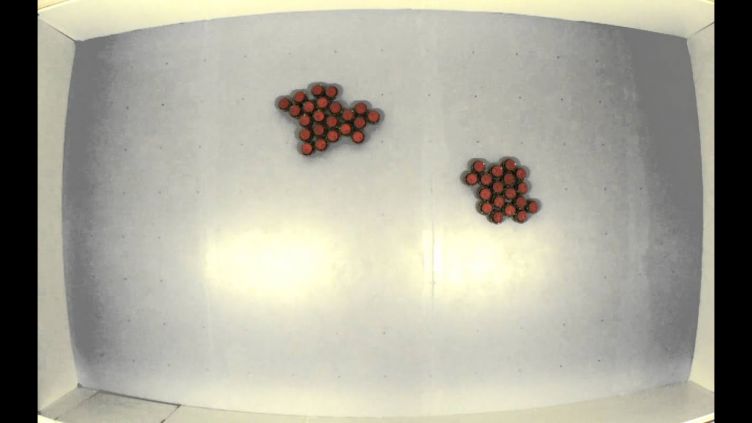
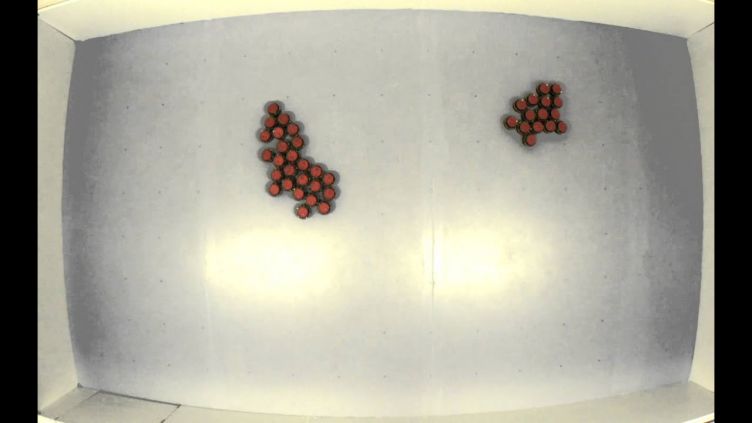
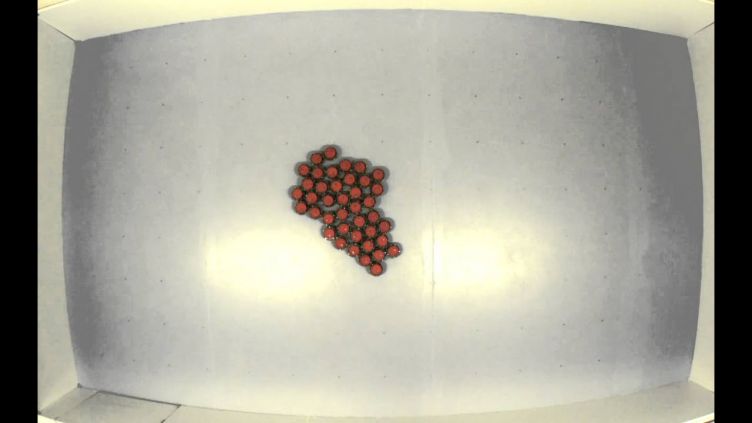
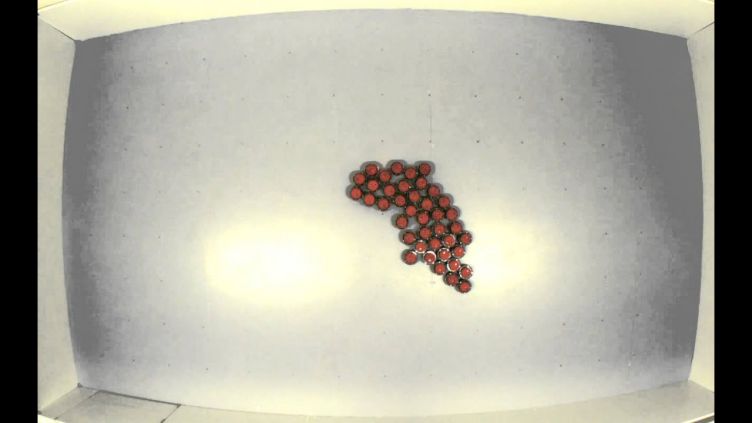
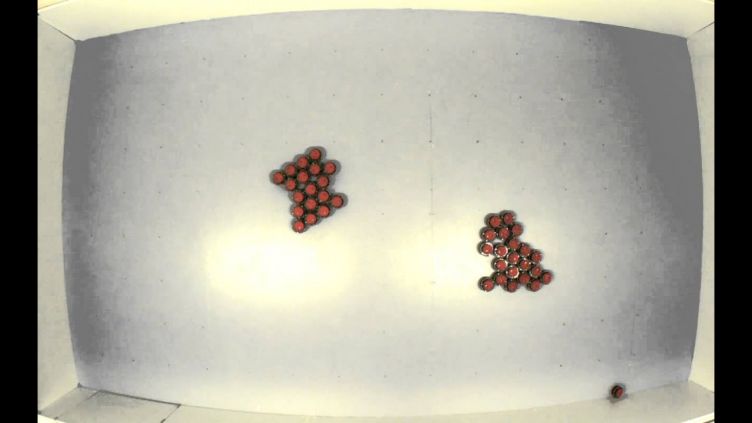
The optimal controller is found by performing a grid search over the space of all possible controllers. This controller is proven to always aggregate two simultaneously-moving robots in finite time, an upper bound for which is provided. Simulations show that the controller also aggregates at least 1000 robots into a single cluster consistently.
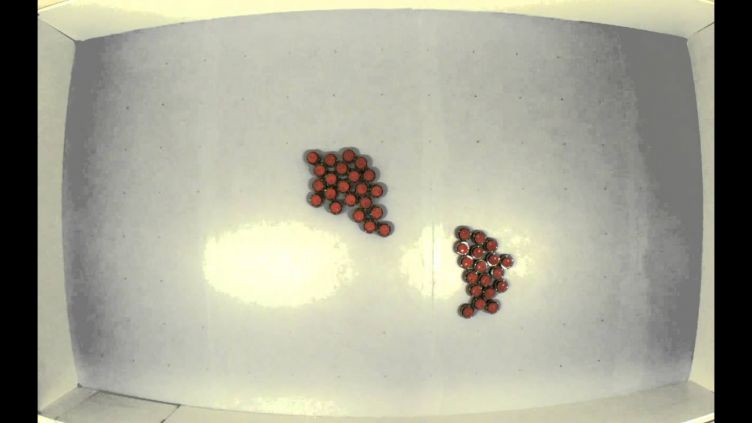
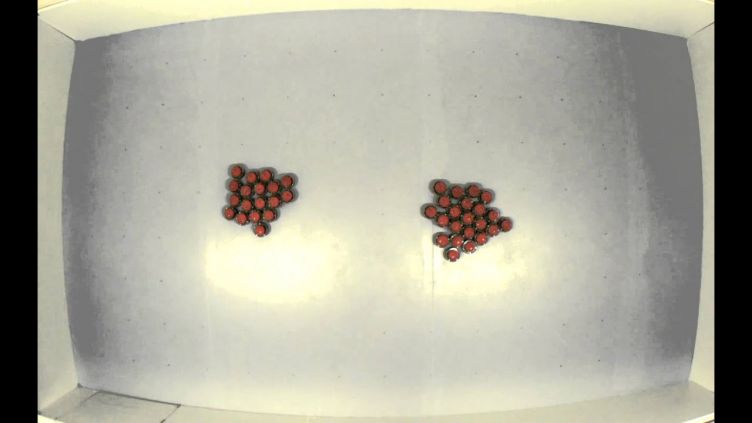
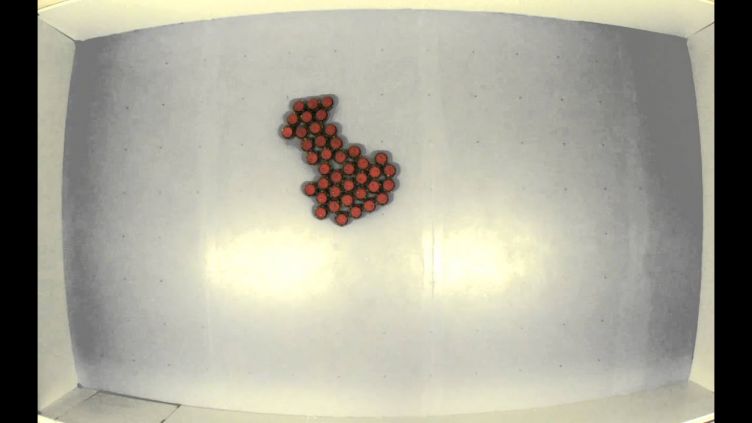
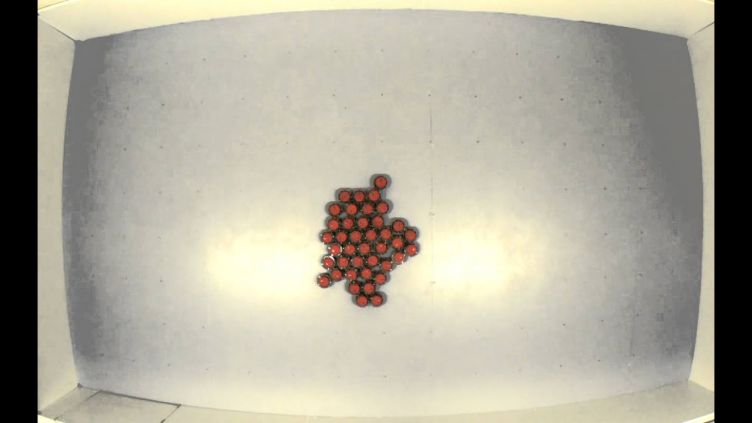
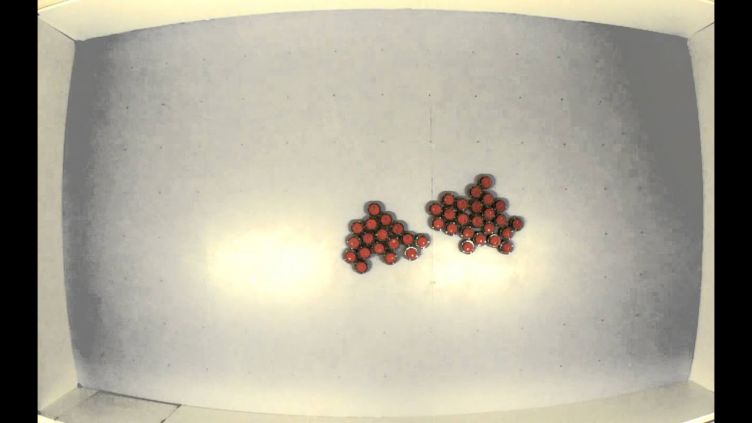
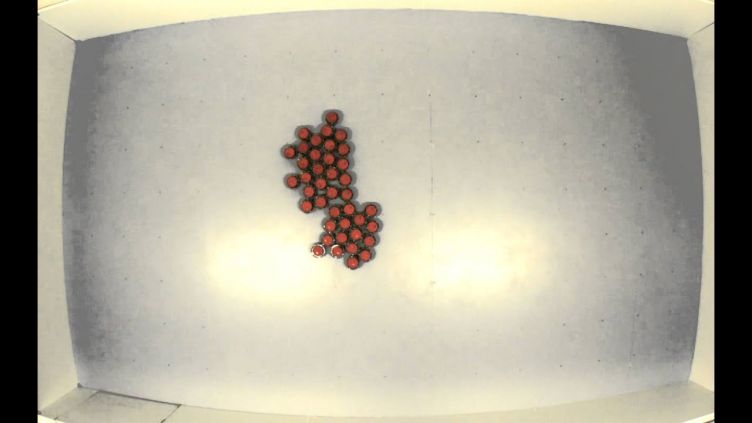
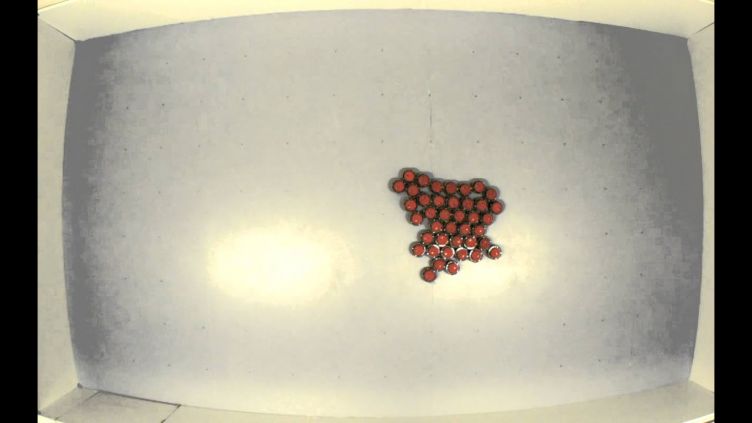
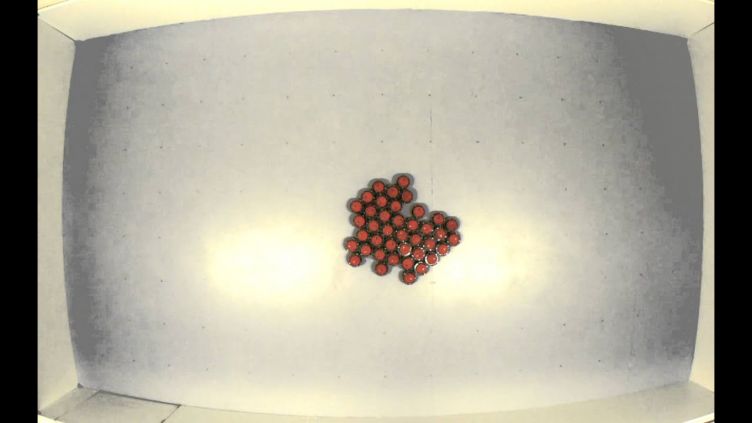
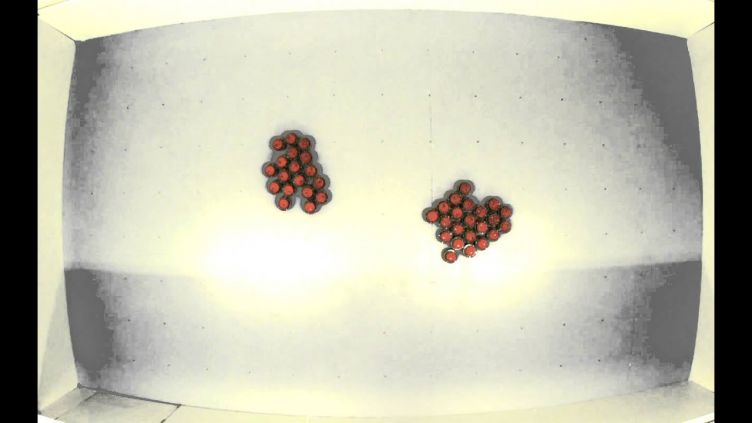
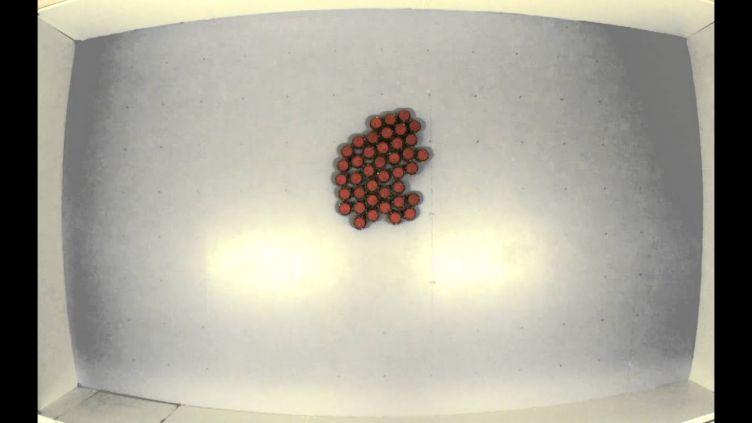
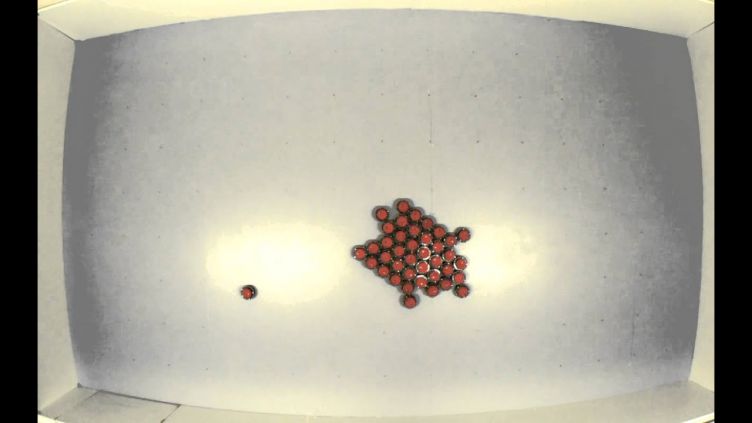
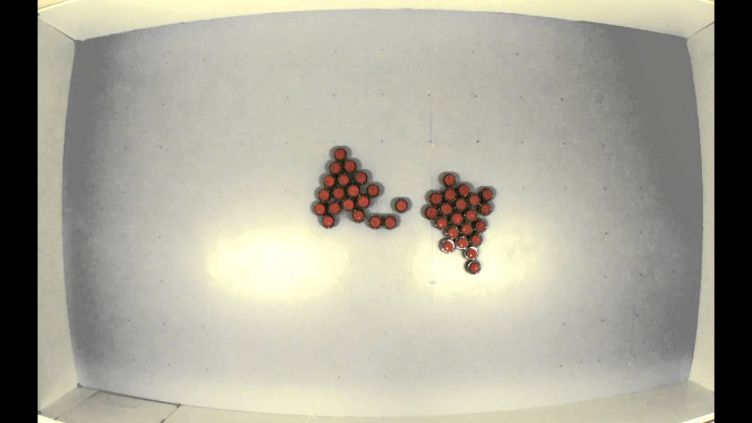
In 30 experiments with 40 physical e-puck robots, 98.6% of the robots aggregated into one cluster. The results obtained have profound implications for the implementation of multi-robot systems. A violation of the 'principle of locality' may be the best way to solve problems when the robots are too small to compute.
Highlight video

Additional analyses


Extensions to other behaviours
At the time of writing, we have been able to extend the framework introduced in this work to other collective robotic tasks in simulation.
These are results for circle formation and object clustering. These behaviours are with robots that are memoryless and unable to compute.
Circle formation

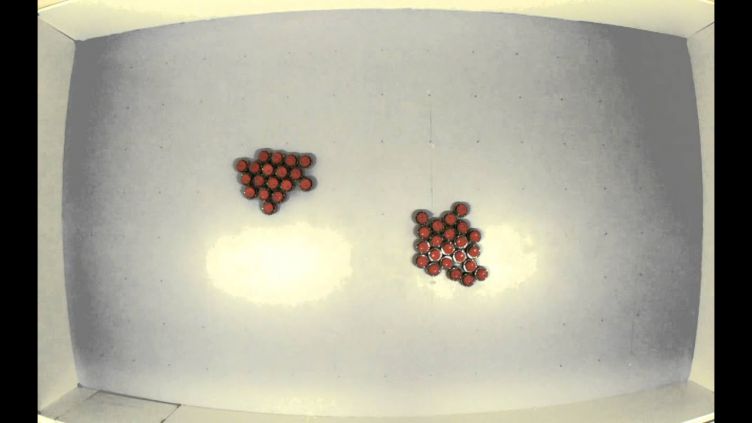
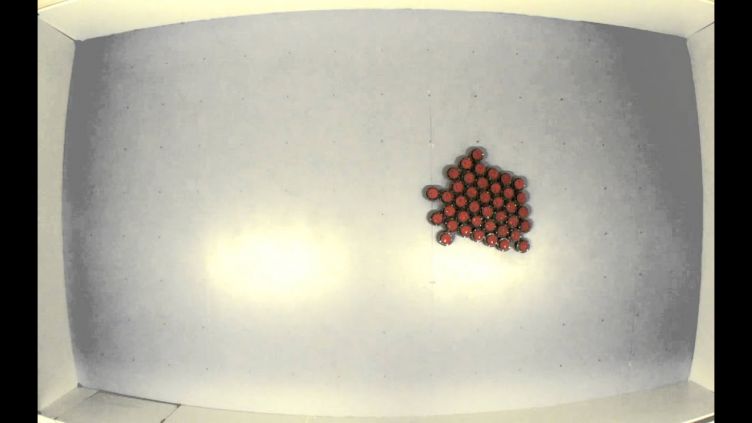
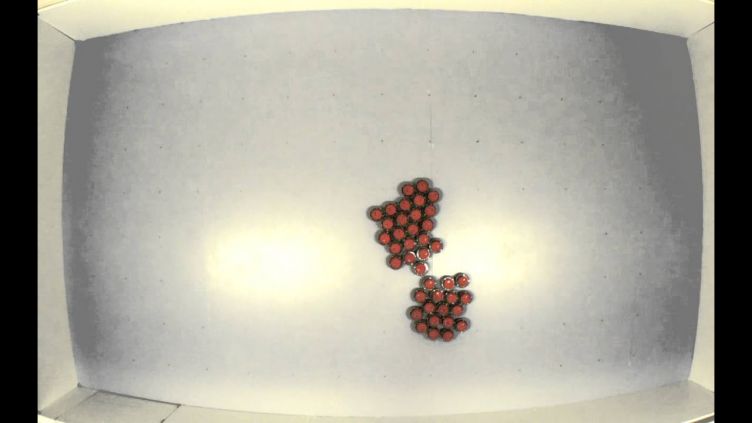
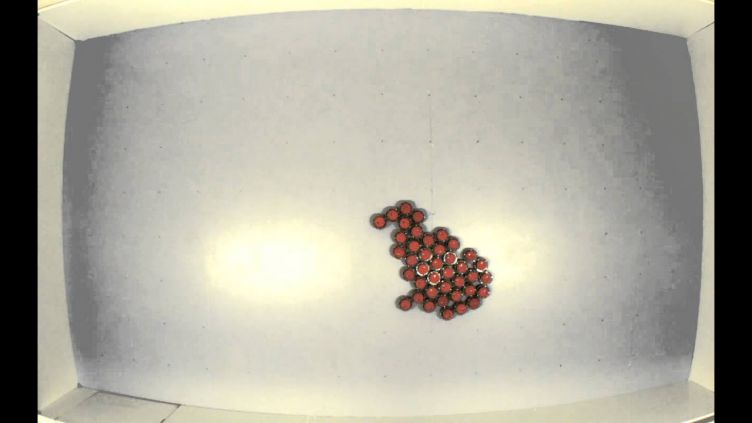
Object clustering

Videos of physical experiments
Videos of the 30 trials with physical e-puck robots, accelerated to 15 times real time.
- Trial 1
-
- Trial 2
-
- Trial 3
-
- Trial 4
-
- Trial 5
-
- Trial 6
-
- Trial 7
-
- Trial 8
-
- Trial 9
-
- Trial 10
-
- Trial 11
-
- Trial 12
-
- Trial 13
-
- Trial 14
-
- Trial 15
-
- Trial 16
-
- Trial 17
-
- Trial 18
-
- Trial 19
-
- Trial 20
-
- Trial 21
-
- Trial 22
-
- Trial 23
-
- Trial 24
-
- Trial 25
-
- Trial 26
-
- Trial 27
-
- Trial 28
-
- Trial 29
-
- Trial 30
-