
Occlusion-based cooperative transport with a swarm of miniature mobile robots
Jianing Chen, Melvin Gauci, Wei Li, Andreas Kolling and Roderich Groß

Abstract
This paper proposes a strategy for transporting a large object to a goal using a large number of mobile robots that are significantly smaller than the object.
The robots only push the object at positions where the direct line of sight to the goal is occluded by the object.
This strategy is fully decentralised and requires neither explicit communication nor specific manipulation mechanisms. We prove that it can transport any convex object in a planar environment.
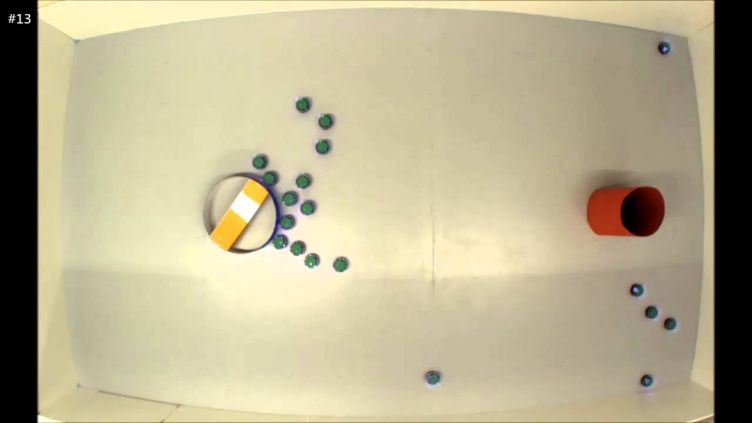
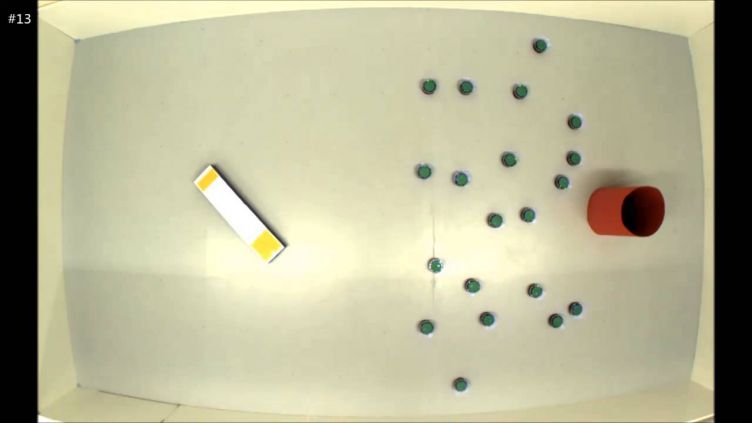
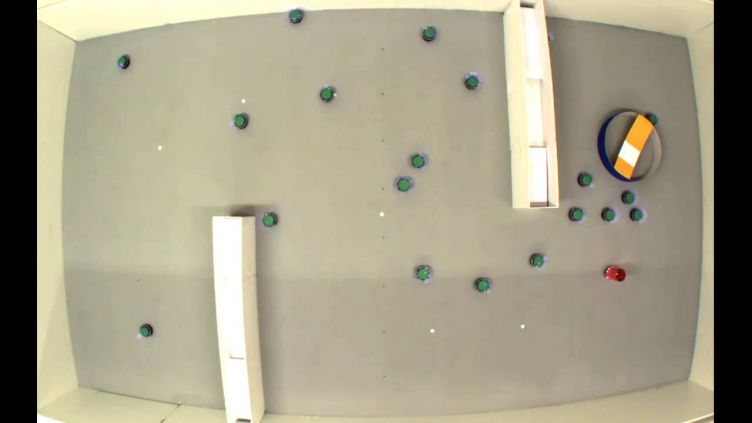
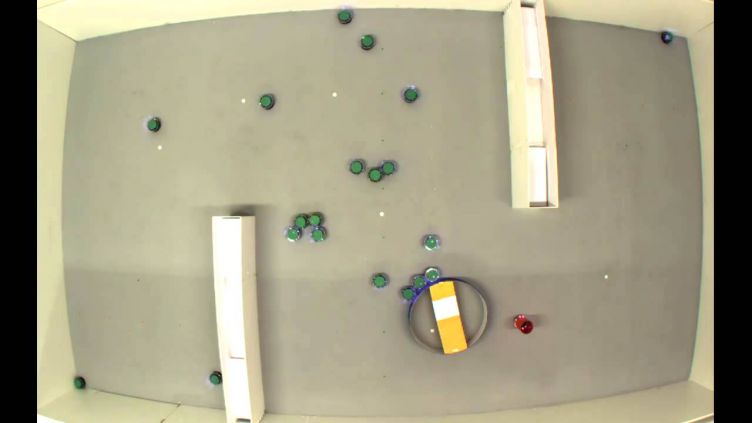
We implement this strategy on the e-puck robotic platform and present systematic experiments with a group of 20 e-pucks transporting three objects of different shapes. The objects were successfully transported to the goal in 43 out of 45 trials.
Further experiments show that the goal can be mobile, making it possible to navigate the object around obstacles.
We also tested the strategy in a 3D environment using physics-based computer simulation. Due to its simplicity, the transport strategy is particularly suited for implementation on micro-scale robotic systems.
Accompanying video

Motion controller weight matrices
e-puck proximity sensor numbers

Sensor input weights
S1. Search object (avoid everything nearby)
| nS | 0.85 or -0.5 | |||||||
|---|---|---|---|---|---|---|---|---|
| nD | -0.12 to 0.12 | |||||||
| ke | 0 | |||||||
| SR | -0.25 | -0.25 | 0 | 0 | 0 | 0 | -0.25 | -0.25 |
| SA | -0.125 | -0.125 | 0 | 0 | 0 | 0 | -0.125 | -0.125 |
| DR | 4.25 | 3.75 | 1 | 2 | -2 | -1 | -3.25 | -3.5 |
| DA | 2.125 | 1.875 | 0.5 | 1 | -1 | -0.5 | -1.625 | -1.75 |
S2. Move to object (avoiding robots and obstacles)
| nS | 0.8 | |||||||
|---|---|---|---|---|---|---|---|---|
| nD | 0 | |||||||
| ke | -0.4 | |||||||
| SR | -0.5 | 0 | 0 | 0 | 0 | 0 | 0 | -0.5 |
| SA | -0.125 | -0.125 | 0 | 0 | 0 | 0 | -0.125 | -0.125 |
| DR | 0 | 1 | 0.5 | 0 | 0 | -0.5 | -1 | 0 |
| DA | 3 | 2.5 | 1 | 0 | 0 | -1 | -2.5 | -3 |
S3. Close in on object (repelled by robots, attracted by objects)
| nS | 0.6 | |||||||
|---|---|---|---|---|---|---|---|---|
| nD | 0 | |||||||
| ke | -0.4 | |||||||
| SR | -0.75 | -0.25 | 0 | 0 | 0 | 0 | -0.25 | -0.75 |
| SA | -0.25 | -0.25 | 0 | 0 | 0 | 0 | -0.25 | -0.25 |
| DR | -2.5 | -2.25 | -1 | 0 | 0 | 1 | 2.25 | 2.5 |
| DA | 3 | 2.5 | 1.5 | 0 | 0 | -1.5 | -2.5 | -3 |
S5. Push object (robot avoiding and object following)
| nS | 0.55 | |||||||
|---|---|---|---|---|---|---|---|---|
| nD | 0 | |||||||
| ke | 0 | |||||||
| SR | 0 | -0.125 | -0.25 | 0 | 0 | -0.25 | -0.125 | 0 |
| SA | -0.25 | -0.125 | 0 | 0 | 0 | 0 | -0.125 | -0.25 |
| DR | -1.5 | -1.125 | -0.375 | 0 | 0 | 0.375 | 1.125 | 1.5 |
| DA | 1.5 | 1.125 | 0.75 | 0 | 0 | -0.75 | -1.125 | -1.5 |
S6. Move around object (left-hand wall following)
| nS | 0.5 | |||||||
|---|---|---|---|---|---|---|---|---|
| nD | 0.5 | |||||||
| ke | 0 | |||||||
| SR | 0 | 0 | 0 | 0 | 0 | 2 | 1.5 | 0 |
| SA | 0 | 0 | 0 | 0 | 0 | 1.5 | 0.75 | 0 |
| DR | 0 | 0 | 0 | 0 | -1 | -4 | -6 | -6 |
| DA | 0 | 0 | 0 | 0 | -0.5 | -1 | -2.5 | -2 |
S7. Evade (repulsive motion)
| nS | 0 | |||||||
|---|---|---|---|---|---|---|---|---|
| nD | 0 | |||||||
| ke | 0 | |||||||
| SR | -0.75 | -0.375 | 0 | 0.625 | 0.625 | 0 | -0.375 | -0.75 |
| SA | -0.75 | -0.375 | 0 | 0.625 | 0.625 | 0 | -0.375 | -0.75 |
| DR | 0.25 | 0.125 | 0 | 0.125 | -0.125 | 0 | -0.125 | -0.25 |
| DA | 0.25 | 0.125 | 0 | 0.125 | -0.125 | 0 | -0.125 | -0.25 |
S8. Scan object (rotate and avoid)
| nS | 0 | |||||||
|---|---|---|---|---|---|---|---|---|
| nD | 0.5 | |||||||
| ke | -0.3 | |||||||
| SR | -0.5 | -0.25 | 0 | 0.25 | 0.25 | 0 | -0.25 | -0.5 |
| SA | -0.5 | -0.25 | 0 | 0.25 | 0.25 | 0 | -0.25 | -0.5 |
| DR | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| DA | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
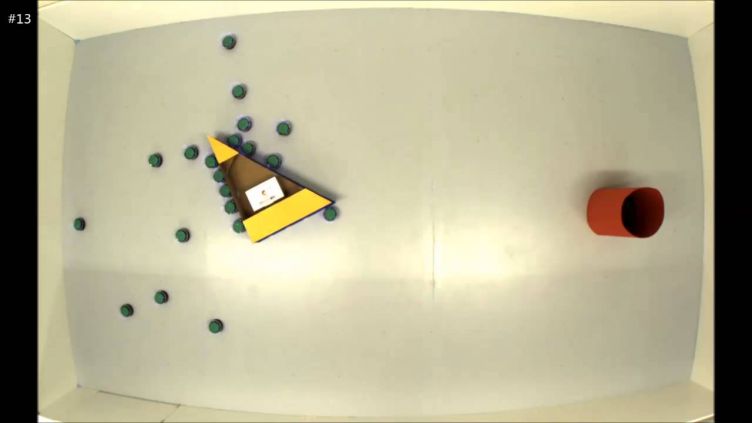
Experiments using objects of different shapes

- Circular object: Trials 1-5
-
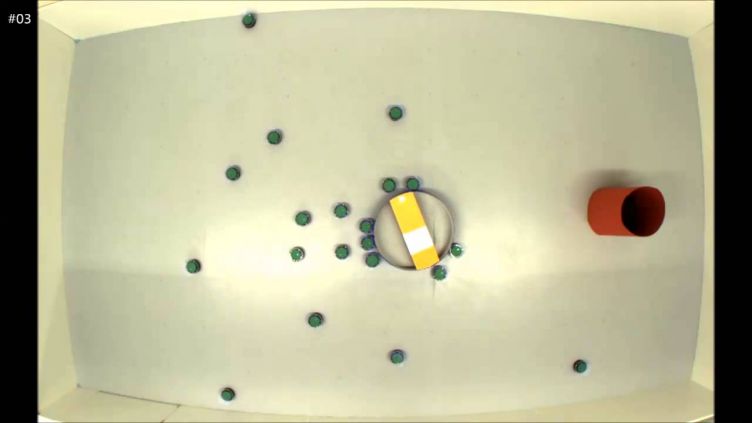
- Circular object: Trials 6-10
-
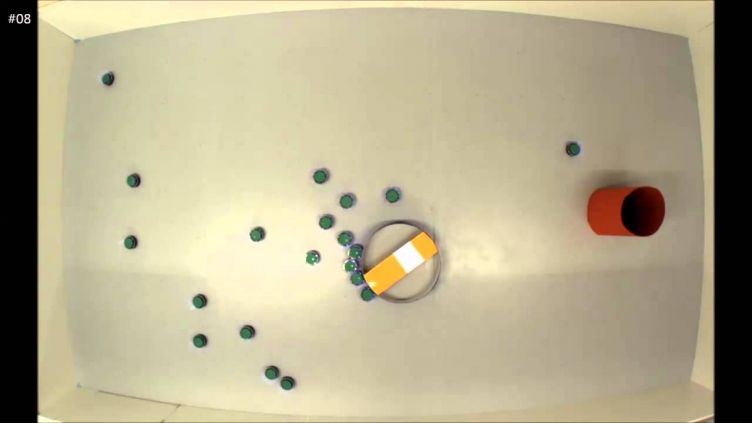
- Circular object: Trials 11-15
-
- Triangular object: Trials 1-5
-
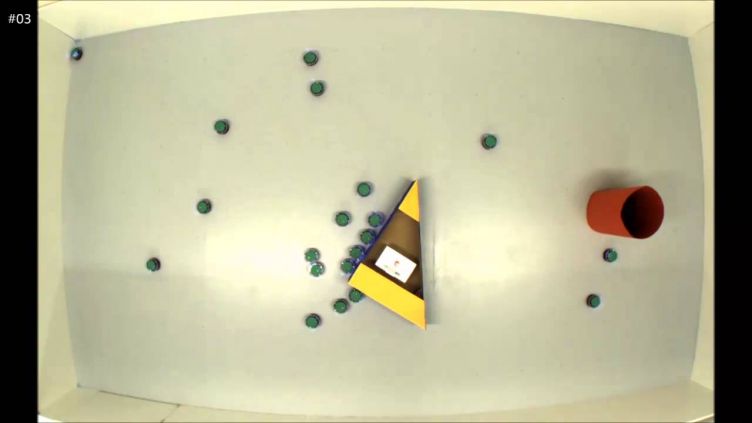
- Triangular object: Trials 6-10
-
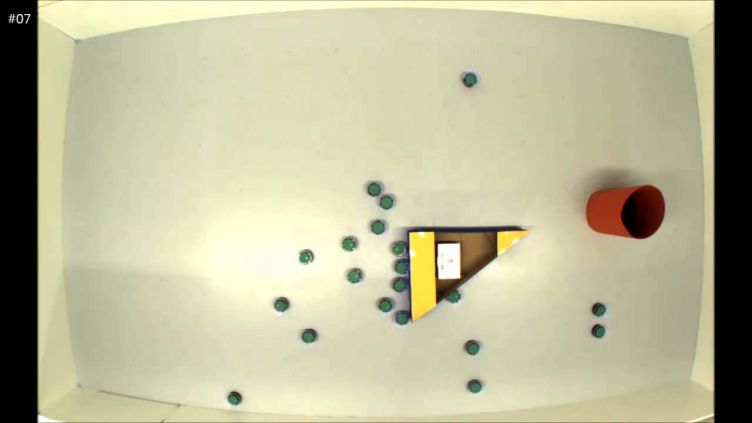
- Triangular object: Trials 11-15
-
- Rectangular object: Trials 1-5
-
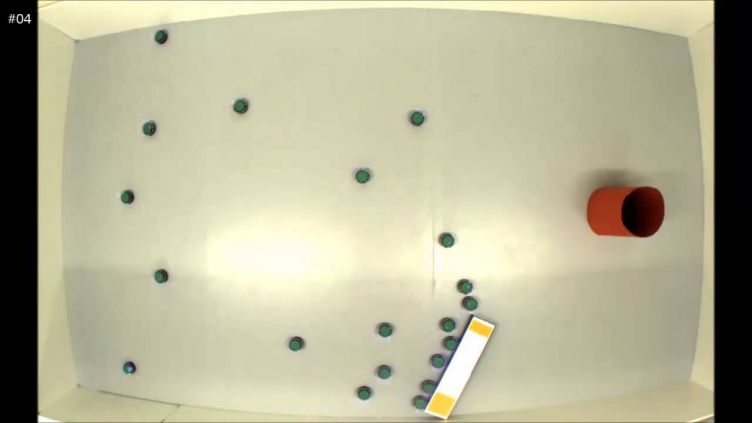
- Rectangular object: Trials 6-10
-
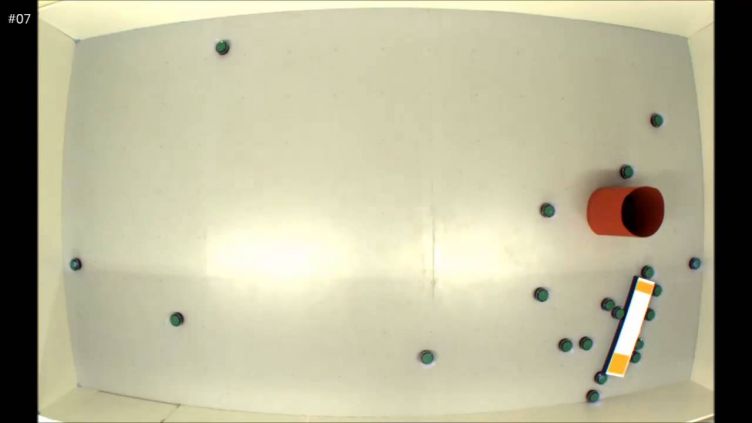
- Rectangular object: Trials 11-15
-









Experiments using a moving goal

- Trials 1-4
-

- Trials 5-8
-
- Trials 9-12
-
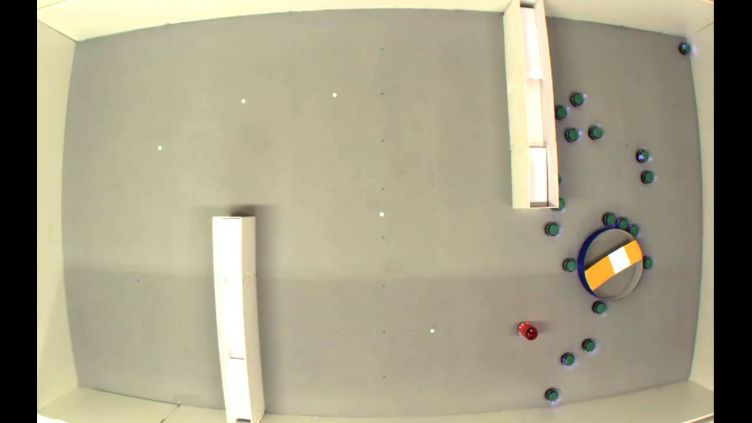
- Trials 13-16
-
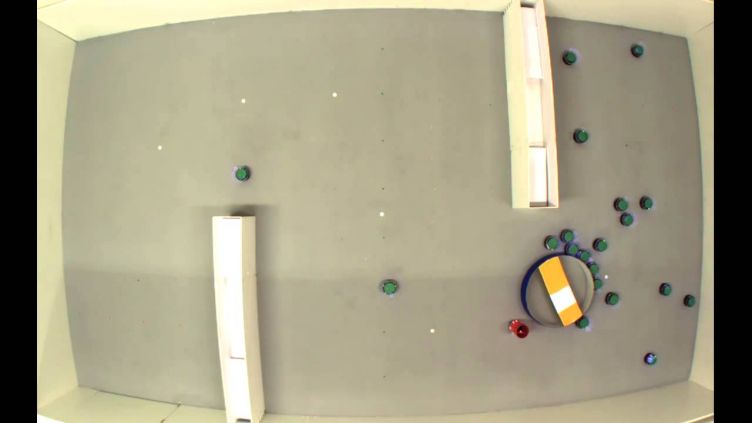
- Trials 17-20
-





Computer simulation in 3D environments
The occlusion-based cooperative transport strategy proposed in this paper can also be applied in 3D environments.
We had implemented this strategy in a simulated 3D environment using a conceptual robots.
Systematic experiments were conducted to test the system using objects of four different shapes. Each of the following videos show the typical situations for each shape.
Sphere

Cone

Cube

Capsule

Future works
Foraging
The transport strategy as it stands is not able to automatically deal with an environment that is more complex, for example, one in which there are obstacles between the object and the goal.
However, it is possible to adapt the goal object in the strategy to expand the capability of the transport system.
For example, the goal could be a group of robots forming a number of intermediate goals so that the object could be very far from the goal and there could be obstacles in between.
