
Supervisory control of robot swarms using public events
Yuri K Lopes, Stefan M Trenkwalder, Andrè B Leal, Tony J Dodd and Roderich Groß
Abstract
Supervisory Control Theory (SCT) provides a formal framework for controlling discrete event systems. It has recently been used to generate correct-by-construction controllers for swarm robotics systems.
Current SCT frameworks are limited, as they support only (private) events that are observable within the same robot.
In this paper, we propose an extended SCT framework that incorporates (public) events that are shared among robots. The extended framework allows to model formally the interactions among the robots.
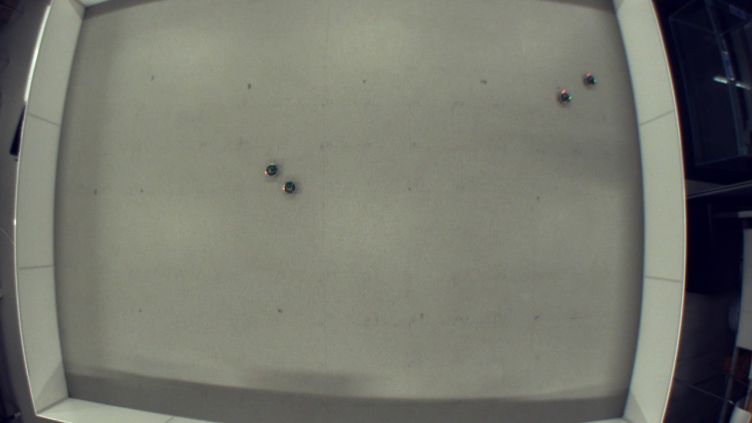
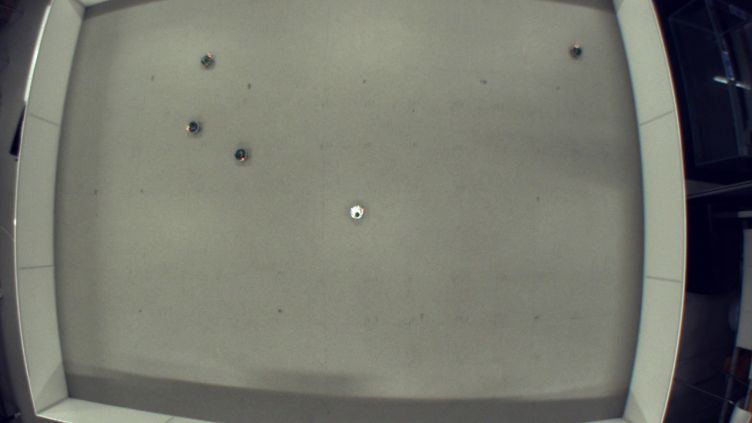
It is evaluated using a case study, where a group of mobile robots need to synchronise their movements in space and time, a requirement that is specified at the formal level.
We validate our approach through experiments with groups of e-puck robots.
Videos of physical experiments
- Trial 1
-

- Trial 2
-

- Trial 3
-
- Trial 4
-
- Trial 5
-
- Trial 6
-
- Trial 7
-
- Trial 8
-

- Trial 9
-

- Trial 10
-










Nadzoru
Nadzoru is an open-source development tool for supervisory control synthesis. With a user-friendly GUI, models can be created, analysed, and simulated.
The source code of controllers can be automatically generated. By changing the templates, this tool can generate code for different devices from the same model