Surgical robot challenge
Students in the Department of Automatic Control and Systems Engineering were tasked with designing and building a simulated surgical robot.

Assessments and modules may change before you start your course. This is an example of the assessment for this module but tasks may change each year to improve your experience.
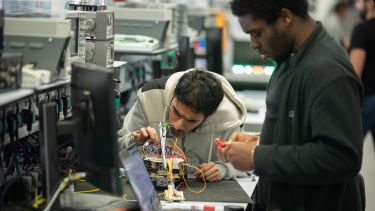
Second year students were set a challenge to design and build a robot that could perform tasks similar to those being used in robotic surgery for the second year Mechatronics module.
With support from teaching staff, students needed to build a mobile robot with wheels and an arm, that could autonomously (without human intervention) carry out a number of tasks inside a robot arena designed to replicate a surgical theatre.
The first task for the robots was the surgical tool delivery, where the robot needed to pick up a tool (a whiteboard marker) from a stand, go through a tunnel, and insert the tool into one of a number of holes. After inserting the tool the robot needed to navigate back to its start position.
The second task was the robots needed to simulate an incision on the body of the patient. Starting with the tool (white board marker), the student’s robots needed to travel to a vertically standing whiteboard marker and draw a shape on a target area. The more accurate shape within the target area, the higher the score.







As well as accuracy and ability to perform the tasks, robot devices were scored for speed and how many times the tasks were completed in a given time.
As well as the demonstration, students were expected to complete a final report on their robot. The report would justify the decisions the group took in designing their robot and describe the final specifications with respect to the mechanical and electronic design, the control algorithms programmed to perform the tasks, how reliable and accurate the robot performed and a reflection on what they would have done differently.
As well as technical engineering skills, students needed to show excellent project management skills to plan, design and purchase the components needed to build their robot, and collaborate efficiently.
Students said that the module assignment put into practice what they've learnt from other modules. That the challenges faced to build and control the robots for the challenge enabled them to experience what real-world robotic and control engineering is like.
The Mechatronics module is led by Dr Dana Damian and Dr Shuhei Miyashita. Both these staff carry out ground-breaking biomedical robotics and microrobotic research.